China Solves the ‘Last Meter’ Problem: How New LiDAR Tech Revolutionizes Autonomous Modular Bus Docking
China Solves the ‘Last Meter’ Problem: How New LiDAR Tech Revolutionizes Autonomous Modular Bus Docking
What if the future of urban transit is not bigger buses, but smarter ones that physically link while moving? Researchers at South China University of Technology and Tsinghua University have cracked a critical technical bottleneck that has stymied autonomous modular bus docking deployment: millimeter-precision positioning in cluttered urban environments.
The breakthrough represents a significant leap in China’s autonomous vehicle capabilities. While Tesla and Waymo dominate headlines with robotaxi prototypes, China’s automotive ecosystem is solving granular infrastructure challenges that could define the next decade of public mobility.
The Docking Dilemma: Why Modular Buses Fail Without Precision
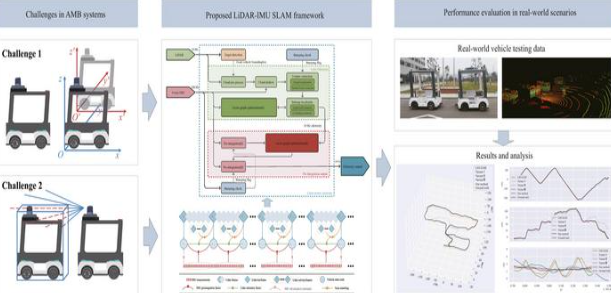
Autonomous modular buses—often called ‘platooning buses’ or ‘road trains’—represent a paradigm shift in public transit. These vehicles can couple and uncouple dynamically during operation, allowing flexible capacity management and energy-efficient platooning. However, the technology demands extraordinary precision.
- Horizontal accuracy: Required to align docking mechanisms within centimeters
- Vertical stability: Critical for passenger bridge connections and mechanical coupling
- Dynamic occlusion: Nearby vehicles frequently block LiDAR sensors during maneuvering
Traditional SLAM (Simultaneous Localization and Mapping) algorithms excel in static environments but suffer catastrophic drift when sensors are partially occluded—a common scenario in busy bus terminals. According to the research published in Green Energy and Intelligent Transportation, conventional methods exhibit significant Z-axis drift during these maneuvers, making reliable docking impossible.
The Technical Innovation: A Three-Pronged Approach
The Chinese research team did not just tweak existing algorithms; they re-architected the sensor fusion approach for high-clutter docking scenarios.
1. Two-Stage Scan-to-Map Matching with Ground Constraints
Rather than relying solely on point-to-point matching, the framework implements ground plane constraints that anchor the Z-axis estimation. This prevents the vertical ‘floating’ that occurs when LiDAR hits vehicle undercarriages or uneven pavement during close-proximity maneuvers.
2. Factor Graph Optimization with IMU Reset
The system leverages high-frequency Inertial Measurement Unit (IMU) data to provide roll and pitch constraints, periodically resetting the optimization graph to prevent long-term drift accumulation. This is particularly crucial during the slow-speed precision movements required for docking.
3. Deep Learning-Based Occlusion Filtering
Perhaps most impressively, the framework employs real-time front vehicle detection using deep learning to identify and filter point cloud data from occluding vehicles. Instead of treating occlusion as noise, the system recognizes the obstruction and compensates using predictive modeling.
Real-world testing demonstrated significant reductions in both absolute and relative pose error compared to existing LOAM (Lidar Odometry and Mapping) variants, particularly in double-bus docking scenarios.
Why Western Investors Should Watch This Space
While U.S. and European autonomous vehicle development focuses predominantly on passenger cars and highway trucking, China is aggressively commercializing specialized autonomous public transit infrastructure. This is not merely academic—companies like Baidu, WeRide, and Pony.ai are already operating L4 autonomous bus services in Guangzhou, Beijing, and Shenzhen.
The modular bus concept addresses a critical gap in Western urban planning: the ‘last mile’ problem for mass transit. Unlike fixed rail, these systems offer metro-like capacity with bus-like flexibility. For investors, this represents a divergent technological path where Chinese firms are building patent portfolios in specific application domains while Western competitors chase general-purpose autonomy.
See our analysis on China’s L4 autonomous driving permit landscape and what it means for Tier 1 suppliers
The Competitive Intelligence Angle
This development aligns with broader trends in China’s intelligent transportation strategy. As reported by Bloomberg, municipal governments are pouring billions into V2X (Vehicle-to-Everything) infrastructure specifically designed to support autonomous public transit.
The technical sophistication here rivals anything coming from Western Tier 1 suppliers like Bosch or Continental, but with application-specific optimization that could create moats in the public transit AV market. If this SLAM framework becomes standardized within China’s domestic bus manufacturers—BYD, Yutong, and King Long—it could establish de facto technical standards that European manufacturers must license.
Challenges and Limitations
The research acknowledges significant constraints. Current validation relies on controlled datasets; real-world performance across diverse weather conditions (heavy rain, snow, fog) remains unproven. Additionally, the computational requirements for real-time deep learning-based occlusion filtering may limit deployment to higher-end sensor suites.
Nevertheless, the trajectory is clear: China is solving the ‘boring but critical’ engineering problems that separate AV demos from commercial viability.
Conclusion: The Infrastructure Play
For Western automotive investors, this research signals a strategic inflection point. The autonomous vehicle race is not just about who has the best neural network—it is about who can solve the millimeter-precision mechanical integration challenges that make commercial deployment economically viable.
As modular bus systems move from trial to scale, expect this LiDAR-IMU SLAM optimization to become a foundational technology for smart cities across the Belt and Road Initiative. Western firms ignoring this niche may find themselves licensing Chinese IP to build the autonomous transit systems of tomorrow.